
RV Alis rocked by bad weather at the main wharf on Wallis. Image: Gildas Roudaut
An ambitious plan to explore a previously unknown zone
Wallis and Futuna has no oceanic fisheries industry but would like to know more about potential resources in its offshore waters, which up to recently have not been explored much.
The Pacific Community (SPC) and the French Institute of Research for Development (IRD) offered to conduct a sur- vey at sea to gather information about micronekton – small fish, squid and molluscs that large marine predators eat. We made a request to the French oceanographic fleet in 2016 for a research vessel to be made available to use. The request was accepted and the mission was scheduled for July 2018.
Because it is difficult to get time granted to a project on a research vessel, the research team – consisting of six sci- entists specialising in acoustics, micronekton, chemistry, phytoplankton and electronics – developed an ambitious programme to make the best possible use of the two-week period. Given the lack of data on micronekton in this area, the goal was to explore the EEZ from north to south and from east to west in order to produce a map of micronekton diversity and abundance. The team wanted to explore both the northern part of the EEZ on the Pacific Plate, which is characterised by deep water, and the southern part of the EEZ on the Australian Plate, which is shallower. We also wanted to explore very deep areas such as trenches and sea- mounts, which often have high biodiversity and are biologi- cally rich. We identified 19 sampling stations of interest off the coasts of the islands of Wallis and Futuna, and at each station, physical (e.g. temperature, currents), chemical (e.g. nitrates, phosphates) and biological (phytoplankton, zoo- plankton and micronekton) measurements would be taken with the help of the ship’s crew, who would set the instru- ments in the water.
The weather was the master of the ship
Due to rough seas and high winds, we quickly had to scale down our ambitious plans because although we were on a research vessel with costly equipment – the latest in acoustic technology – and a team of specialists and professional seafarers who were ready and waiting, going to sea in such weather and sea conditions would have made working con- ditions quite difficult. Winds averaged 30 knots (with gusts up to 40 knots) for the first four days. The pass through Wal- lis Lagoon to the open sea is very narrow, and so the harbour pilot decided that it was prudent to wait until sea condi- tions were calmer. In fact, an oil tanker had to wait outside the pass for several days before it could enter the lagoon to deliver its cargo. The tanker’s crew later told us that they had had to contend with a three- to four-meter swell.
After spending three days at the ftata’Utu wharf, with cross winds and a swell that drove our research vessel against the wharf, the captain decided to leave the wharf and instead shelter in the lee of a small island in the lagoon. We spent two more days here before the wind dropped enough to allow us to go out the pass. Those two days were used to set up the expedition’s equipment, in particular the new acoustic devices that included a surface sonar. When we were finally able to leave the lagoon, we tried to reach the sampling points that had been chosen. Unfortunately, with average winds of 25 knots and a strong swell, we were forced to return to the leeward side of Wallis and Futuna islands to find calmer waters. The final sampling effort ended up being much smaller than initially planned, with only four stations sampled offshore and six stations sampled (i.e. about half of the stations initially planned) on the leeward side of the Wallis and Futuna islands very close to shore.
New instruments deployed
This expedition provided an opportunity to deploy two new acoustic instruments: a wideband autonomous echo sounder and a surface echo sounder. During our mission we used several echo sounders designed to assess zooplankton and micronekton abundance and describe their horizontal and vertical spatial distributions. The RV Alis was equipped with a SIftRAD EK60 single-beam echo sounder (located under the hull) with four frequencies (38, 70, 120 and 200 kHz), which receives the echoes of organisms located at depths of 10–120 m for the 200 kHz transducer, up to 200 m for the 120 kHz transducer, 450 m for the 70 kHz transducer, and 800 m for the 38 kHz transducer. Because the signals return- ing from great depths are less accurate than those from organ- isms closer to the vessel, below a depth of 450 m we only received signals on a single frequency. In order to transform these acoustic signals into information that could be used to identify organism groups (e.g. gelatinous organisms, fish), the acoustic signals from at least two different frequencies were needed and three frequencies gave the best results.
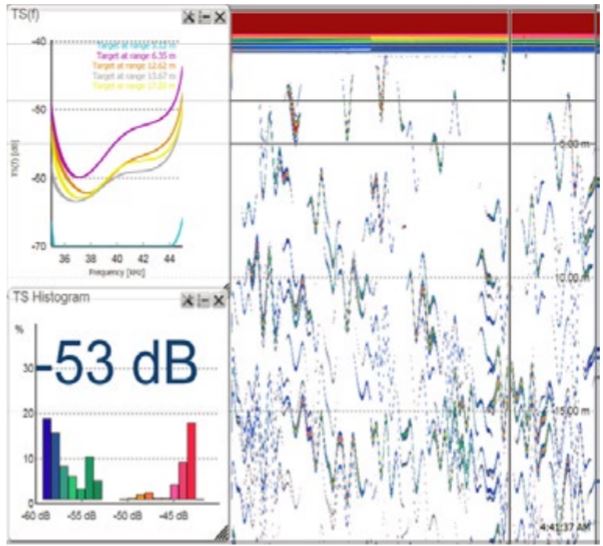
The first instrument tested was the Simrad Wideband Autonomous Transceiver (WBAT), an echo sounder with two frequencies (38 kHz and 120 kHz). This autonomous device can be sent down to great depths, and during our mis- sion it was sent down to a depth of 500 m. When placed down into a micronekton layer, the sounder is very close to the organisms– as opposed to when using the hull sounder – and it becomes possible to observe and count individual signals. In addition, we gained access to the acoustic signal of each target on the two frequencies, something that would have been impossible to do with only the hull echo sounder. We were able to place the WBAT in the water five times in micronekton layers that we had previously sampled with the trawl. Several months will be needed to analyse these prom- ising data.
The team also wanted to test a surface echo sounder in order to observe organisms in the first 10 m below the surface. We are particularly interested in this layer of water, which is not observed by the hull sounder because many pelagic predators feed directly under the surface such as mahi mahi, certain seabirds and tunas. One of the goals was to capture the acoustic signal of flying fish, which spend most of their time in the surface layer. It is not easy to observe the first 10 m, so specific arrangements were made, including install- ing a removable pole on the side of the ship. A customised stand was built for the base of the surface sounder (single- beam SIftRAD EK60, 120 kHz) so it could be installed on the end of the pole (Fig. 3). We waited until the ship was anchored away from the bad weather to finalise the sound- er’s installation and carry out the first tests of this instru- ment. The sounder’s beam was directed towards the surface and to the side of the boat to avoid the bubbles created by turbulence as the boat moved forward.

However, if the ship rolled too much or listed, the surface waves would also cause bubbles that would interfere with the signal, although computer processing can partially remove the signal inter- ference. Unfortunately, with the poor weather conditions during the survey, the sea was too agitated and we were only able to lower the pole into the water twice. The two trials we were able to carry out, including one around a fish aggrega- tion device, have little chance of being useful because there was considerable interference in the signal. However, the data will still be analysed so as to improve the system before using it again in the future.
Sharing our work with students
Another high point of this mission was the awareness work we did with junior secondary and high school students on Wallis and Futuna. With the help of the staff of the Fisher- ies and ftarine Resources Department and the Wallis and Futuna French National Education Office and the princi- pals and teachers of several schools, we were able to organise school visits.
We made a stopover on Futuna during the mission and the scientific team went to Sisia Junior Secondary School as the ship was moored out to sea and not at the wharf so students could not come on board. For an hour and a half, we presented our work to a year-11 class using PowerPoint presentations, videos and micronekton specimens collected at the beginning of the survey at sea.

On the final day of the trip at the wharf on Wallis, we were able to host a visit of two high-school classes in their final year of scientific studies and one year-10 class. The visit was arranged in five rotating workshops that changed every 15 minutes, involving groups of five to six students. There was a workshop on physical instruments and phytoplankton on the aft deck, one on micronekton in the wet lab, one on acoustics in the science station, another on the pelagic ecosystem in the mess hall, and finally, one on the bridge where the first mate and the lieutenant explained how the ship operated.
The discussions with students were very fruitful and they were both enthusiastic and curious. Some may now even be thinking of becoming scientists or sailors. We also hoped that we showed the girls that scientific professions are open to them as well, especially as five of the six members of the scientific team were women.
Mixed scientific results but impressive human interactions
The weather had a major influence on this campaign and the strong winds and high swell did not allow us to do everything we had planned. The restricted work plan will clearly limit the scope of our results for Wallis and Futuna’s EEZ. However, we were able to visit four seamounts, including Lala Rock close to Wallis, which we will be able to better describe with the data and samples collected. We will need several months to complete the lab work and to analyse all the data that were collected. Despite the mixed scientific outcome, we will keep excellent memories of this sea expe- dition due to the warm welcome we received in Wallis and Futuna from the staff of Environment Department and the Agriculture and Fisheries Department, whose assistance was invaluable. We were very honoured to have an audience with the King of Wallis and to meet with members of the Territorial Assembly, the representative of the prefect on Futuna, and the staff of several institutions. The students both on Futuna and on Wallis were very enthusiastic and we enjoyed our discussions with them. The media also helped spread our message. Finally, we particularly want to acknowledge the crew of RV Alis, who played a large part in maintaining a good atmosphere on board, despite problems with the weather, and who displayed a great deal of skill, flexibility and humour. This mission was full of rich won- derful encounters and we will be happy to return to present our results in Wallis and Futuna during the first half of 2019.
Acknowledgements
This survey at sea was carried out as part of the BIOPELAGOS project funded by the European Union’s BEST2.0 programme and implemented by SPC and IRD.